生命はどこから生命なのか? すなわち生命1.0の条件とは何か? 生命0.1や生命0.5は存在しないのか? こうした問いを追いかけてきた連載の最終章は、「では、生命2.0がいるとしたら?」を最前線の研究者たちに訊いています。
 絵・米田絵理
絵・米田絵理
今回も、返ってくる答えは私たちの生命観を揺さぶるものばかり。ぐらり、とくる感覚を、ぜひ味わってください。
そして次回は、いよいよ最終回です!
ノーベル化学賞受賞者の呪い
現在の「生命1.0」がメジャー・バージョンアップしたら、どうなるか。あるいは我々とは出自も系統もまったく異なる生命がいるとしたら、それはどんな姿をしているか。前回に引き続き、研究者の方々に「生命2.0」のイメージを語ってもらおう。
最初にご登場いただくのは、東北大学工学部・分子ロボティクス研究室准教授の野村 M. 慎一郎(のむら・M・しんいちろう)さんである(写真1)。野村さんからは以前、キッチンで人工細胞をつくるレシピをご提供いただき、第7回で紹介した。
もともとの専門は合成化学で、大学学部生時代の担当教授は、ノーベル化学賞受賞者ロバート・バーンズ・ウッドワードの弟子だった。野村さんによればウッドワードは「この世にあるものはすべて合成できると言い切っちゃった人」だそうで、「『だから君たちは生命をつくれ』『生命は必ず合成できる』みたいな呪いを受けて育った」という。
現在の研究は多彩で、生物学から物理学、ロボット工学にまで分野を広げている。
野村さんも、第7回から第9回までご登場いただいた東京工業大学・地球生命研究所(ELSI)特任准教授の車 兪澈(くるま・ゆうてつ)さんと同様、ベシクル(脂質二重膜の袋)を使ってさまざまな実験を行っている。ただ車さんとちがって「生命の起源」を再現するというよりは、どちらかというと自然に学びながら、何か面白い機能をもった人工細胞や、実用的なシステムをつくることに興味があるようだ。

たとえば細菌のような天然の細胞と人工細胞とをくっつけて、中身を交換する実験などを行っている。これには「コネキシン」という膜タンパク質(トンネルのような役割をする)を使う方法や、膜を直接、融合させる方法などがある。
こうした方法を使うと、人工細胞から天然細胞に何か薬を入れてコントロールするとか、磁気を帯びたビーズを入れて物理的に動かしたりといったことが、できるようになる。あるいは人工細胞内でタンパク質をつくらせているときに、栄養が足りなくなったら天然細胞から借りてくる、といったこともできる。
ミクロの「ターミネーター」出現
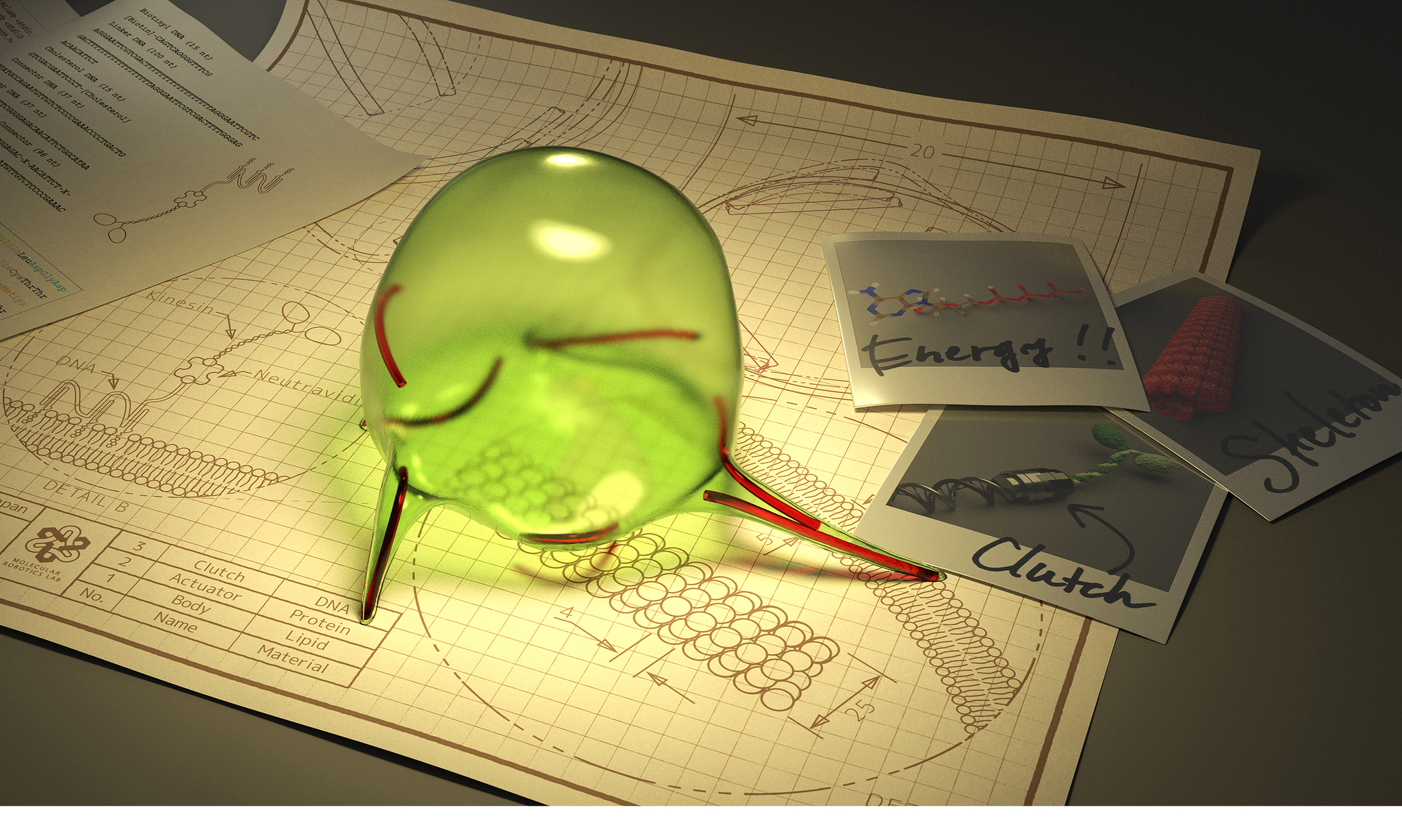
もっとわかりやすい例は「分子ロボット」の開発だ。材料に金属やプラスチックなどではなく、タンパク質や核酸、脂質といった生体分子を使って、顕微鏡サイズのロボットをつくる。広い意味で人工細胞とも言えるのだが、あえて生命を目指すことはしない。機械工学で言えば人間そのものではなく、人間と人形との間にあるようなもの、つまりは「Pepper(ペッパー)」や「ASIMO(アシモ)」に当たる存在を、分子でつくりたいようだ。
その1つとして最近、プロトタイプの開発に成功したのが「アメーバ型分子ロボット」である。平たく言えばアメーバのように動く人工細胞だ。大きさは数十マイクロメートル(人間の細胞と同程度)で、静止しているときの見た目は、ただの丸いベシクルである。
天然のアメーバは、ご存知のように不定形な原生生物(真核生物のうち生活史のほとんどを単細胞の状態で過ごすもの)だ。移動するときには細胞の後方から前方へ原形質の一部を流動させ、「仮足」という足のような構造をつくり、それを前に伸ばして進む。
アメーバ型分子ロボットも細胞を変形させて動くのだが、その動力は原形質の流れではない。中にタンパク質でできた硬い微小管が何本も入っていて、それを「モータータンパク質」でスライドさせる。天然の細胞にも微小管は骨格のような形で存在しているが、分子ロボットでは、その断片が浮いている感じだ。野村さんたちは、それを「分子アクチュエータ」と呼んでいる(図1)。
モータータンパク質は第6回にも出てきたが、天然細胞では微小管の上を歩くように移動しながら、さまざまな物質を運ぶ役目を果たしている。その場合は微小管が足場として固定されている形だが、逆にタンパク質を細胞膜に固定して微小管をその上に浮かせておくと、今度は微小管が足に蹴られて動いてしまう。それを利用するのだ。
ただ動かしっぱなしでは細胞の移動を制御できないため、適当なタイミングでオン/オフできる仕組みが必要になる。そこでDNAを利用した「分子クラッチ」も導入した。これは紫外線を当てると二重鎖が解けてしまうという特殊なDNAで、それがクラッチを入れる信号になる。プロトタイプなので、今のところはクラッチを一度しか切り替えられないが、原理的には何度でも可能だ(図2、写真2)。


細胞としては完全に閉じているため、あらかじめ中に入れておいたエネルギー源(ATP)を使い果たしてしまえば、動かなくなってしまう。それが寿命だとすると、プロトタイプの場合は約80分だ。
また移動速度は(ランダムながら)1時間に320マイクロメートルほどだという。本物のアメーバは1時間に3000~6000マイクロメートル、つまり3~6ミリメートルくらいだというから、ちょっとかなわない。ただ白血球の一種でアメーバのように移動するマクロファージは、1時間に120マイクロメートルほどだ。それに比べれば、かなり速い。プロトタイプの性能としては、悪くないと言えるだろう。将来的には細胞レベルでの診断・治療や、環境汚染のモニタリングなどへの応用が期待できるという。
この分子ロボットは大学院生だった佐藤佑介さん(現・東京工業大学特別研究員(SPD))を筆頭著者として、アメリカの『サイエンス・ロボティクス』という学術誌に昨年、発表された(動画1)。野村さんによれば、その後、妙に人気が出たという。海外のブログなどで「こいつらはターミネーターをつくるつもりだ!」などと騒がれたりした。つまり映画『ターミネーター2』に出てきた「T-1000型」という液体金属ロボットを連想させたらしい。水銀のような液状から人間の姿にまで、自由自在に形を変えられる暗殺ロボットのことである。
確かに無数のアメーバ型分子ロボットがひとかたまりになって、協調しながら動くようになれば、実現できそうな気もする。暗殺には使わないでほしい。