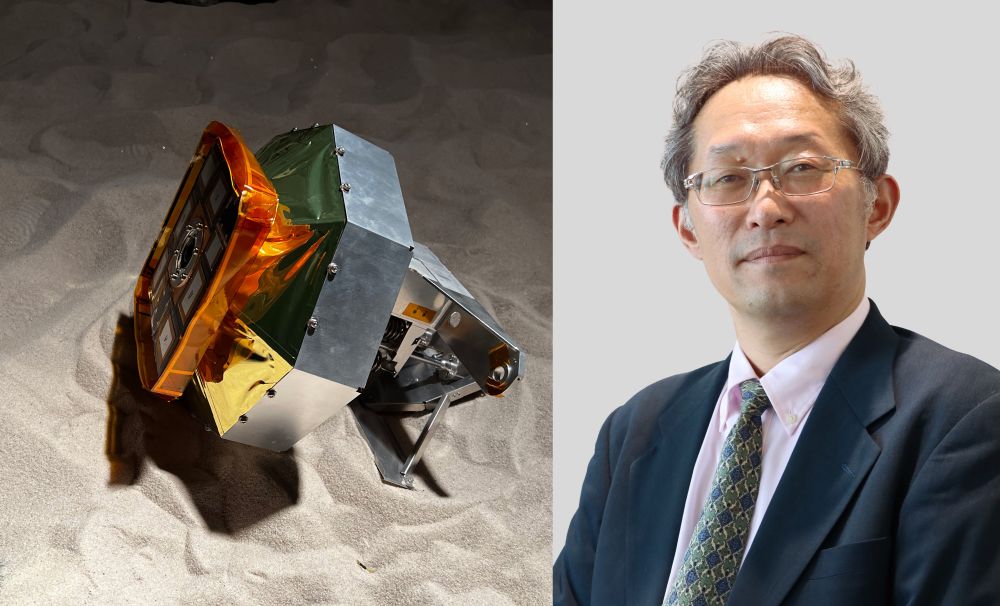
天体観測用小型ローバー「LEV-1」と國井教授
理工学部教授 國井康晴が、国立研究開発法人宇宙航空研究開発機構(JAXA)と共同開発した月探査小型ローバ「Lunar Excursion Vehicle-1 (LEV-1)」が、2023年9月7日に H-IIAロケットにて月に向けて打ち上げらました。
※高層風が打上げ時の制約条件を満たさないため、2023年8月28日の打上げは中止されましたが、新たに打ち上げ日時が決定されました。
「LEV-1」は、H-IIAロケットと共に打ち上げられる月着陸実証機「Smart Lander for
investigating Moon (SLIM)」に搭載され、SLIMが月面に着陸する直前に分離・射出されます。
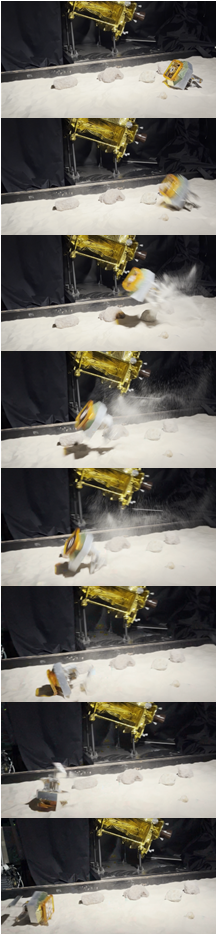
約2Kgの機体で月面をジャンプしながら自律的に移動(左写真参照)し、月面の撮影・観測やSLIM着陸機の撮影に挑み、データを地球に直接送信するミッションを担っています。
また、同じくSLIMから射出される「LEV-2 」(タカラトミー、JAXA)の観測・動作データの通信を中継する役割も担います。
なお「LEV-1」は、國井康晴教授が実施したJAXA探査イノベーションハブでの研究課題ならびに、現在、プロジェクトマネージャ(PM)を務める内閣府の「ムーンショット型研究開発事業」における研究開発課題において、将来的な月面洞窟探査を目指している小型跳躍移動ロボットREDシリーズと同時期に研究開発が行われ、将来的な小型ロボットおよび跳躍移動を用いた探査技術実証の意味を持ちます。
打ち上げの詳細については、下記のJAXAによるプレスリリースおよびJAXAのWebサイトをご覧ください。
X線分光撮像衛星(XRISM)および小型月着陸実証機(SLIM)の打上げ日時について[再設定](JAXA Webサイト2023年9月4日付プレスリリース)
X線分光撮像衛星(XRISM)および小型月着陸実証機(SLIM)の本日(8/28)の打上げ中止について(JAXA Webサイト2023年8月28日付プレスリリース)
X線分光撮像衛星(XRISM)および小型月着陸実証機(SLIM)の打上げ延期について(その2)(JAXA Webサイト2023年8月25日付プレスリリース)
X線分光撮像衛星(XRISM)および小型月着陸実証機(SLIM)の打上げについて(JAXA Webサイト2023年7月11日付プレスリリース)
※クリックすると外部サイトに遷移します。
===
國井教授は、ムーンショット目標3「22050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」(プログラムディレクター(PD)福田 敏男(名古屋大学 未来社会創造機構客員教授))に向けて、課題推進者とともに「未知未踏領域における拠点建築のための集団共有知能をもつ進化型ロボット群」の研究開発プロジェクトを推進しています。
國井教授の研究内容について興味をお持ちの方は、下記もご覧ください。
