
Der Sensorfusionstest misst die Zeitstempelgenauigkeit von Sensoren für Android-Geräte, insbesondere von Kamerabildsensoren und Gyroskopen. Auf dieser Seite finden Sie Schritt-für-Schritt-Anleitungen zur erstmaligen Einrichtung des Sensor Fusion-Tests und der Sensor Fusion Box.
Videoanleitung
Dies ist ein Video-Tutorial zum Einrichten der Sensorfusionsbox.
Notwendige Werkzeuge
Bevor Sie beginnen, stellen Sie sicher, dass Sie über die folgenden Komponenten verfügen:

- USB-A-zu-B-Kabel
- USB-A-auf-C-Kabel (für Testtelefon)
- 12V 2A Netzkabel (für Servosteuerbox)
- 12V-Netzkabel (für Beleuchtung, mit Schalter)
- 5V Stecker-Stecker-Verbindungskabel (für Beleuchtung)
- 5V-Stecker-Buchse-Konvertierungskabel (für Beleuchtung)
Schritt 1: Leuchten anschließen
So schließen Sie die Lichter an:
- Verwenden Sie das Stecker-Stecker-Kabel, um die beiden Leuchten an den unteren Enden der Leuchten zu verbinden, wie in Abbildung 2 gezeigt. Befestigen Sie das Kabel am Boden der Box, damit das Kabel den Betrieb nicht beeinträchtigt.
- Verbinden Sie das Ende der Leuchte, das näher an der Austrittsöffnung des Lichtkabels liegt, mit dem Konvertierungskabel

Abbildung 2. Verbinden der Leuchten untereinander und einer Leuchte mit dem Konvertierungskabel - Lichtkabel-Ausgangsloch
- USB-Kabelausgangsloch
- 5V-Stecker-Stecker-Konvertierungskabel
- Führen Sie das nicht angeschlossene Ende des Konvertierungskabels durch das runde Loch, das aus der Box austritt, und schließen Sie es dann an das Stromkabel für die Beleuchtung an.

Abbildung 3. Beleuchtungsumwandlungskabel, das aus der Box kommt und an das Stromkabel angeschlossen wird - Austrittsloch
- Konvertierungskabel
- Stromkabel
Schritt 2: Servo anbringen
So befestigen Sie das Servo:
- Stecken Sie den Servostecker in die Servosteuerung. Stellen Sie sicher, dass Sie den Stecker so einstecken, dass er den entsprechenden Farben entspricht (Y = Gelb, R = Rot, B = Schwarz), da eine umgekehrte Reihenfolge den Motor beschädigen könnte. Wenn das Kabel zu kurz ist, verwenden Sie ein Servo-Verlängerungskabel .

Abbildung 4. Servoanschluss an die Servosteuerbox - Schließen Sie die Servosteuerung mit ihrem Netzkabel an (die Beleuchtung und die Servosteuerung verfügen über unabhängige, dedizierte Netzteile).

Abbildung 5. Anschließen der Servosteuerung an das entsprechende Netzkabel - Verwenden Sie das USB-A-auf-B-Kabel, um die Servosteuerbox mit dem Host (der Maschine, die den Test ausführt) zu verbinden.

Abbildung 6. Anschließen der Servosteuerbox an die Hostmaschine
Schritt 3: Telefon anschließen
- Setzen Sie das Telefon auf die Halterung und klemmen Sie es fest. Ziehen Sie es fest, indem Sie die Nylonschraube nach rechts drehen.

Abbildung 7. Platzieren und Festklemmen des Telefons an der Halterung Telefone sollten so platziert werden, dass sich die USB-Kabel am Rand der Telefonhalterung und die Kameras in der Nähe der Mitte der Halterung befinden.
- Befestigen Sie das USB-Kabel des Telefons mit einem Kabelbinder an der Befestigungsplatte und führen Sie es durch das Ausgangsloch aus der Box. Schließen Sie das andere Ende des Kabels an den Host an, auf dem der Test ausgeführt wird.
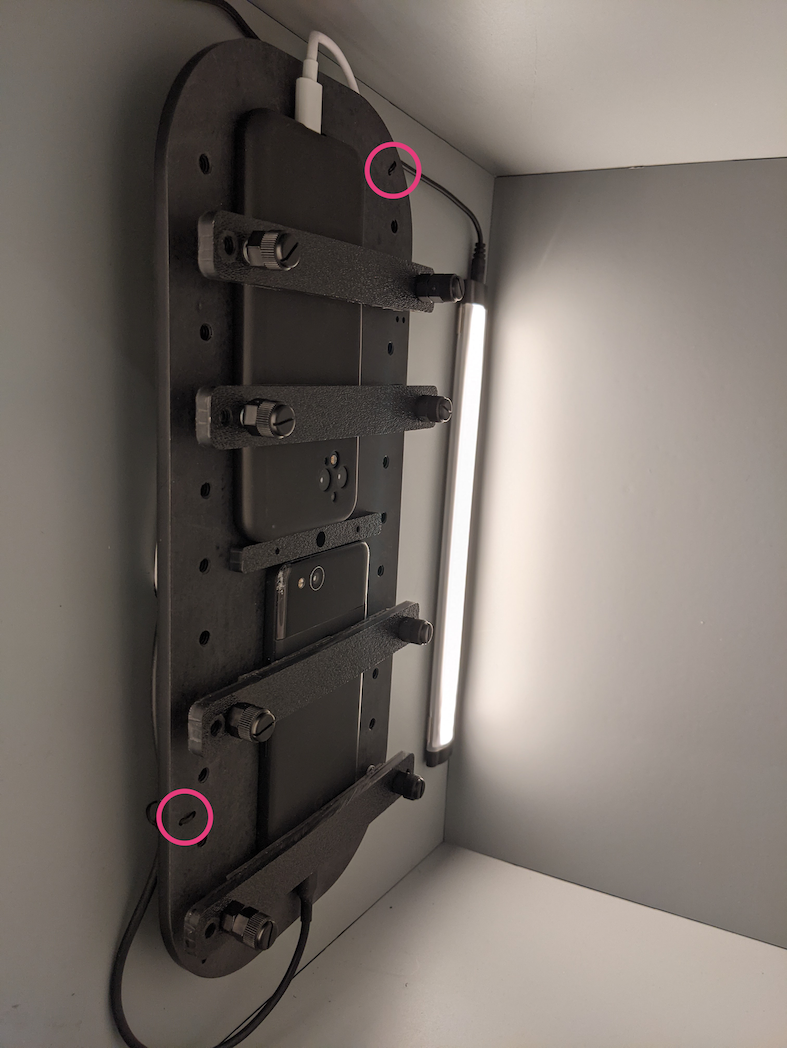
Abbildung 8. Telefon-USB-Kabel, das mit Kabelbindern an der Halterung befestigt ist
Schritt 4: Testskript ausführen
Die wichtigste ausführbare Python-Datei für das Testskript ist:
python tools/run_all_tests.py device=ID camera=0 scenes=sensor_fusion rot_rig=default
Sie können den Befehl ändern, um die tatsächliche Rotatoradresse anzugeben, indem Sie Folgendes verwenden:
rot_rig=VID:PID:CH
- Um die Vendor ID (VID) und Product ID (PID) zu ermitteln, verwenden Sie den Linux-Befehl
lsusb. - Standardmäßig sind VID und PID auf
04d8undfc73mit Kanal „1“ eingestellt.
Mehrere Läufe, unterschiedliche Formate
Um mehrere Läufe mit unterschiedlichen Formaten durchzuführen, können Sie ein anderes Skript verwenden (die Ergebnisse werden jedoch nicht in CtsVerifier.apk hochgeladen). Beispieltestskript:
python tools/run_sensor_fusion_box.py device=FA7831A00278 camera=0 rotator=default img_size=640,360 fps=30 test_length=7Berechtigungsprobleme
So lösen Sie Berechtigungsprobleme im Zusammenhang mit der Steuerung des Motors über den USB-Anschluss:
- Fügen Sie den Operator-Benutzernamen zur
dialoutGruppe hinzu, indem Sie Folgendes verwenden:sudo adduser USERNAME dialout - Melden Sie den Bediener ab.
- Melden Sie sich als Operator an.